|

|
NTN's New Rotation Sensor Bearing Series
Has Triple the Resistance to Magnetic Fields!
NTN Corporation has developed a rotation sensor bearing that is less susceptible to the strong magnetic fields generated from electrically driven motors and other items into which sensor bearings are now integrated. NTN is manufacturing this as a new standard series of bearings and sales will start in mid-April, 2005.
In recent years industrial machinery has been shifting towards the use of electrical control to make machinery simpler, automate processes, and reduce the load on the environment. The sensors required for this kind of electrical control are now widely used. Demand has increased for bearings with these built-in rotation sensors since the equipment can be made more compact and installing the sensor is not a problem.
The rotation sensor bearing made by NTN is proving popular with the majority of customers who say it is "resistant to surrounding magnetic fields" . In an ordinary rotation sensor bearings, problems such as a loss of the sensing function or no output signal occur due to the strong magnetic field generated during startup of high-output motors.
The new NTN bearing is highly resistant to magnetic fields. This was achieved by reviewing the design of the structural components, the material of the magnetic encoderNote1) and the magnetic sensor itselfNote2). A high precision rotation sensor bearing resistant to strong surrounding magnetic fields was successfully developed in this way.
These bearing models come in six types from bearing number 6202 through 6209.
Features
- Resistance to magnetic fields is now about triple that of current market products (bearing can be integrated into high-output motors)
- Higher precision-assembly reduces variations in resistance to magnetic fields.
- Material in magnetic encoder was changed.
- Magnetic sensor was changed to achieve higher sensitivity.
- Size, weight and cost are equivalent to products currently on the market.
- Sensor output is stable within a wide temperature range (-40 to 120°C)
This rotation sensor bearing will be unveiled at the Makuhari Messe from April 20, where it is scheduled to go on display at the "MOTION ENGINEERING JAPAN 2005 - The 14th Motion & Power Transmission Exhibition Exhibits".
DESIGN & PRINCIPLE OF ROTATION SENSOR BEARING
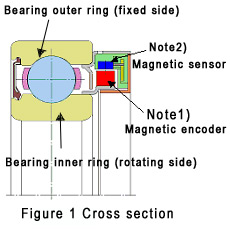
The rotation sensor is made up of a magnetic encoder (device for encoding the rotation speed as north and south pole magnetic signals) and a magnetic sensor for reading (sensing) those encoded magnetic signals (See cross sectional view in figure at right.).
The magnetic sensor is clamped to the outer ring (fixed side) of the bearing.
The magnetic encoder, clamped to the inner ring, rotates along with the rotation of the bearing (inner ring). The north and south poles of the magnetic encoder alternately pass over the surface of the magnetic sensor, generating square waves(output pulses).
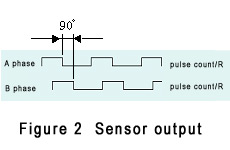
The rotation speed is found by calculating the number of output pulses. Two magnetic sensors (A and B) are positioned so that their square wave outputs are 90 degrees out of phase with each other. This allows the sensor to detect the rotation direction. (See Figure 2).
|
|
Table 1 Main sensor specifications
| ITEM | SPECIFICATIONS |
| Output precision | Adjacent period error | 7% |
| Duty cycle | 50±15% |
| Phase shift | 90°±45° |
| Input | Supply voltage | 3.8 to 24 volts |
| Current consumption | Approx. 10mA (reference value) |
| Output | Waveform | Square wave |
| Configuration | Open collector |
| Temperature | range | -40 to 120°C |
| |
Table 2: Output pulse count by bearings series No. part dimensions
| Bearing series No. | Output pulse count | Bearing dimensions | Sensor dimensions | Remarks |
| Inner diameter | Outer diameter | Width | Inner diameter | Outer diameter | Width |
| 6202 | 32 | Φ15 | Φ35 | 11 | Φ18 | Φ32 | 7.5 | ABphases |
| 6204 | 32 | Φ20 | Φ47 | 14 | Φ29.5 | Φ46.6 | 7.5 | 〃 |
| 6205 | 48 | Φ25 | Φ52 | 15 | Φ33.75 | Φ48 | 7.5 | 〃 |
| 6206 | 64 | Φ30 | Φ62 | 16 | Φ40.6 | Φ58 | 7.5 | 〃 |
| 6208 | 80 | Φ40 | Φ80 | 18 | Φ53 | Φ75 | 7.5 | 〃 |
| 6209 | 80 | Φ45 | Φ85 | 19 | Φ57.3 | Φ77 | 7.5 | 〃 |
|
|
|